Barcelona International Young Student Challenge 2025
During 7 days, students from several countries arround the world have developed a PocketQube, going from concept and design, to implementation and validation.
The UPC NanoSat Lab at the Technical University of Catalonia specializes in the design and development of nano-satellite missions for Earth Observation. Offering a hands-on, multidisciplinary environment, the lab enables students to engage in cutting-edge space technology through the CDIO initiative, fostering innovation in satellite systems and payload integration.

Features
We design, manufacture, test and launch small satellites used for both scientific and educational purposes.
In the lab, several payloads have been developed to be implemented in satellites such as RITA or FSSCat
With the help of Universitat Poltècnica de Catalunya, numerous educational projects have been done going from educational talks to subjects being conducted in the lab.
Our lab facilities provide the opportunity to test your own device
The blog is used to display all Nanosatlab posts. This includes news and basic info of each project or mission.
During 7 days, students from several countries arround the world have developed a PocketQube, going from concept and design, to implementation and validation.
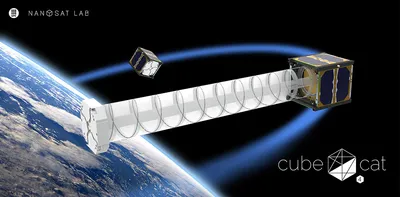
The fourth satellite in the NanoSat Lab's CubeCat series.
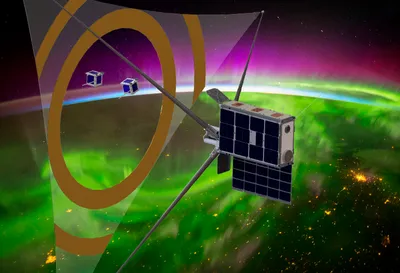
The eighth satellite in the lab's CubeCat series
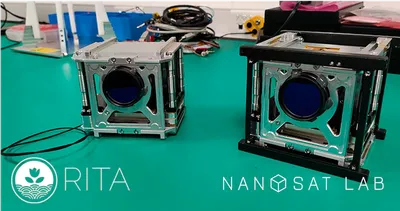
A New Space Mission from UPC NanoSat Lab for Earth Observation - RITA/3Cat-6
Don't hesitate to access our repo!